Common Model Parameters
This section describes the common instrument model parameters among all instrument types. The expected key/value pairs for initialization of the parameters from json/ dict is described along with examples.
orientation json object
Orientation (of a instrument or spacecraft) is parameterized as intrinsic rotations specified by Euler angles and sequence with respect to an user-specified reference frame. The definition of the Euler angle rotation is identical to the one used in the orbitpy->propcov->extern->gmatutil->util->AttitudeUtil, AttitudeConversionUtility C++ classes.
A Euler sequence = 123 implies the following rotation: R = R3.R2.R1, where Ri is the rotation matrix about the ith axis. A positive angle corresponds to an anti-clockwise rotation about the respective axis. Each rotation matrix rotates the coordinate system (not the vector). See:
The first subfield of the orientation JSON object is the referenceFrame subfield.
See Reference Frames for description about the reference frames.
Parameter |
Type |
Units |
Description |
|---|---|---|---|
referenceFrame |
string |
Accepted values are EARTH_CENTERED_INERTIAL, EARTH_FIXED, NADIR_POINTING or SC_BODY_FIXED. |
The second subfield of the orientation JSON object is the convention subfield.
Parameter |
Type |
Units |
Description |
|---|---|---|---|
convention |
string |
Accepted values are REF_FRAME_ALIGNED, SIDE_LOOK, XYZ or EULER. |
According to the specified convention, other subfields materialize as follows:
"convention": "REF_FRAME_ALIGNED"
Aligned with respective to the underlying reference frame.
Example:
"orientation": {
"referenceFrame": "NADIR_POINTING",
"convention": "REF_FRAME_ALIGNED"
}
"convention": "SIDE_LOOK"
If the orientation is to be specified via a side-look-angle (which corresponds to rotation about the y-axis only), the following subfields apply:
Parameter |
Type |
Units |
Description |
|---|---|---|---|
sideLookAngle |
float |
degrees |
Side-look angle |
Example:
"orientation": {
"referenceFrame": "NADIR_POINTING",
"convention": "SIDE_LOOK",
"sideLookAngle":10
}
Note that the rotation about y-axis corresponds to a roll motion when the reference-frame is the nadir-pointing frame.
"convention": "XYZ"
Here the orientation is to be specified via set of three rotation angles about the X, Y and Z axis. The order of (intrinsic) rotations is: (1) rotation about instrument X-axis, (2) rotation about instrument Y-axis and last (3) rotation about instrument Z-axis.
Parameter |
Type |
Units |
Description |
|---|---|---|---|
xRotation |
float |
degrees |
rotation about instrument X-axis |
yRotation |
float |
degrees |
rotation about instrument Y-axis |
zRotation |
float |
degrees |
rotation about instrument Z-axis |
Example:
"orientation": {
"referenceFrame": "NADIR_POINTING",
"convention": "XYZ",
"xRotation":10,
"yRotation":20,
"zRotation":0
}
"convention": "EULER"
Here the orientation is to be specified via set of Euler angles and sequence.
Parameter |
Type |
Units |
Description |
|---|---|---|---|
eulerAngle1 |
float |
degrees |
Rotation angle corresponding to the first rotation. |
eulerAngle2 |
float |
degrees |
Rotation angle corresponding to the second rotation. |
eulerAngle3 |
float |
degrees |
Rotation angle corresponding to the third rotation. |
eulerSeq1 |
int |
Axis-number corresponding to the first rotation. |
|
eulerSeq2 |
int |
Axis-number corresponding to the second rotation. |
|
eulerSeq3 |
int |
Axis-number corresponding to the third rotation. |
Example:
"orientation": {
"referenceFrame": "NADIR_POINTING",
"convention": "EULER",
"eulerAngle1":10,
"eulerAngle2":20,
"eulerAngle3":0,
"eulerSeq1": 3,
"eulerSeq2": 1,
"eulerSeq3": 3
}
fieldOfViewGeometry (Spherical-Geometry) json object
The fieldOfViewGeometry is used to characterize the spherical-geometry of the sensor field-of-view/ scene-field-of-view/ field of regard
in the SENSOR_BODY_FIXED frame. The Z-axis is assumed to be the pointing-axis.
Note that the orientation of the sensor is required to complete the field-of-view (/ scene-field-of-view/ field of regard) definition.
The fieldOfViewGeometry json object is characterized by the key shape definition.
Three values are allows "CIRCULAR", RECTANGULAR and CUSTOM.
"shape": "CIRCULAR"Specifies a circular shape about the sensor Z-axis.
Input parameter description Parameter
Type
Description
diameter
number
degrees
Diameter (2 times the cone angle)
Example:
"fieldOfViewGeometry": { "shape": "CIRCULAR", "diameter":10 }
"shape": "RECTANGULAR"Specifies a rectangular shape about the sensor Z-axis.
Input parameter description Parameter
Type
Units
Description
angleHeight
number
degrees
Angular height (about sensor X-axis)
angleWidth
number
degrees
Angular width (about sensor Y-axis)
angleHeightandangleWithcorrespond to the along-track and cross-track FOVs respectively in case the sensor-frame is aligned to the NADIR_POINTING frame.Example:
"fieldOfViewGeometry": { "shape": "RECTANGULAR", "angleHeight":10, "angleWidth":30 }
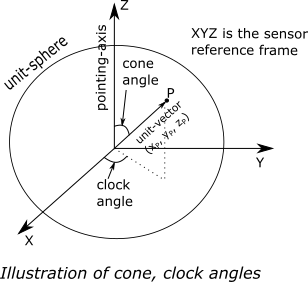
"shape": "CUSTOM"In this case the field-of-view geometry is specified in terms of list of vertices of a spherical polygon. Each vertex is specified via its clock, cone angles. The definition of the clock, cone angles is the same as used in OrbitPy (propcov) package, i.e.
Let (\(x_P\), \(y_P\), \(z_P\)) be a unit vector describing a point on the unit sphere.
The cone angle for the point is:
\(\pi/2 - \sin^{-1}z_P\).
Clock angles are angles (right ascensions) measured anti-clockwise from the + X-axis. The clock angle for the point is:
\(atan2(y_P,x_P)\).
The number of values in
customConeAnglesVectorandcustomClockAnglesVectorshould be the same (except for the case of Circular-shaped geometry in which case see note below). The last point of both the vectors should be the same as the first point to ensure polygon closure.Input parameter description Parameter
Type
Units
Description
customConeAnglesVector
string
degrees
array of cone angle values separated by commas
customClockAnglesVector
string
degrees
array of clock values separated by commas
Note
In case of circular-shaped spherical geometry, the number of values in
customConeAnglesVectorshould be just one (half the circular diameter) and no values incustomClockAnglesVector.
Example:
"fieldOfViewGeometry": {
"shape": "CUSTOM",
"customConeAnglesVector": [10,10,10,10,10],
"customClockAnglesVector": [30,120,180,280,30]
}
"fieldOfViewGeometry": {
"shape": "CUSTOM",
"customConeAnglesVector": 15,
"@id": 123}
sceneFieldOfViewGeometry json object
The scene-field-of-view (sceneFOV) spherical geometry specification characterizes a (approximate) FOV representation of an image ‘scene’. For example, in the case of stripmap SARs, or pushbroom optical scanners, a scene consists of multiple concatenated narrow strips (in the along-track direction). An approximate FOV representation can be specified to represent the observation. If the sceneFOV geometry is not defined, the sceneFOV geometry is assigned to be equal to the instrument FOV geometry.
The purpose of the sceneFOV is to enable faster coverage calculations. Always the sceneFOV or the FOR is considered for coverage calculations in the OrbitPy package.
The json structure is identical to the fieldOfViewGeometry JSON (see fieldOfViewGeometry (Spherical-Geometry) json object).
maneuver json object
This json object specified the total maneuverability of sensor pointing (combining satellite and sensor maneuverability) in the NADIR_POINTING reference frame.
Three types of maneuvers are accepted: CIRCULAR, SINGLE_ROLL_ONLY and DOUBLE_ROLL_ONLY. This should be indicated in the
maneuverType name, value pair. Please refer to Maneuverability and Field Of Regard (FOR) calculations for a complete description of the options.
"maneuverType":"Circular"
This option indicates that the instrument pointing axis can be maneuvered about the nadir vector inside a circular region of diameter as indicated
by the diameter name, value pair.
Parameter |
Data type |
Units |
Description |
|---|---|---|---|
diameter |
float |
degrees |
Diameter |
Example:
"maneuver":{
"maneuverType":"Circular",
"diameter": 25
}
"maneuverType":"Single_Roll_Only"
This option indicates that the instrument can be maneuvered only about the roll axis (of the nadir-pointing frame).
Such an option is expected for instruments which require a pure-side-looking target geometry such as cross-track scanning radiometers.
The range of possible roll is indicated by the rollMin and rollMax name, value pairs. Note that these angles are
defined with respect to the NADIR_POINTING frame.
Parameter |
Data type |
Units |
Description |
|---|---|---|---|
A_rollMin |
float |
degrees |
minimum roll angle |
A_rollMax |
float |
degrees |
maximum roll angle |
Example:
"maneuver":{
"maneuverType":"Single_Roll_Only",
"A_rollMin": 5,
"A_rollMax": 15
}
"maneuverType":"Double_Roll_Only"
This option is similar to the Single_Roll_Only option, except that it allows for definition of two set of roll-ranges (labelled as A and B).
This option is useful to model manuever by purely side-looking (look at the nadir is prohibited) instruments which may be pointed on either ‘side’ (i.e. positive roll region
and the negative roll region) of the nadir-pointing frame (e.g.: synthetic aperture radars).
Parameter |
Data type |
Units |
Description |
|---|---|---|---|
A_rollMin |
float |
degrees |
minimum roll angle of roll region A |
A_rollMax |
float |
degrees |
maximum roll angle of roll region A |
B_rollMin |
float |
degrees |
minimum roll angle of roll region B |
B_rollMax |
float |
degrees |
maximum roll angle of roll region B |
Example:
"maneuver":{
"maneuverType":"Double_Roll_Only",
"A_rollMin": 5,
"A_rollMax": 15,
"B_rollMin": -15,
"B_rollMax": -5
}
pointingOption JSON object
List of orientations to which the instrument axis can be manuevered. Only the NADIR_POINTING reference frame is supported. This input specification is required to perform coverage calculations involving pointing-options.
Example:
"pointingOption":[{
"referenceFrame": "NADIR_POINTING",
"convention": "XYZ",
"xRotation":0,
"yRotation":20,
"zRotation":0
},
{
"referenceFrame": "NADIR_POINTING",
"convention": "XYZ",
"xRotation":0,
"yRotation":40,
"zRotation":0
}]
antenna JSON object
This json object contains the specifications of the antenna. Two types of antenna-aperture shapes are accepted, which should be indicated in the shape
key/value pair.
"shape":"Circular"This option indicates that the shape of the antenna-aperture is circular.
Expected parameters Parameter
Data type
Units
Description
shape
str
Must be “Circular”
diameter
float
meters
Diameter of the antenna.
apertureExcitationProfile
str
Antenna aperture excitation profile. Accepted values are “UNIFORM” and “COSINE”.
apertureEfficiency
float
Aperture efficiency (\(0 < \eta_{ap} < 1\)).
radiationEfficiency
float
Radiation efficiency (\(0 < \psi < 1\)).
phyTemp
float
Kelvin
Physical temperature of the antenna.
Example:
"antenna":{ "shape":"Circular", "diameter": 25, "apertureExcitationProfile": "COSINE", "apertureEfficiency": 0.6, "radiationEfficiency": 0.8, "phyTemp": 290 }
"shape":"Rectangular"This option indicates that the shape of the antenna-aperture is rectangular.
Expected parameters Parameter
Data type
Units
Description
shape
str
Must be “Circular”
height
float
meters
Antenna height (along the along-track direction when SENSOR_BODY_FIXED is aligned to NADIR_POINTING frame).
width
float
meters
Antenna width (along the cross-track direction when SENSOR_BODY_FIXED is aligned to NADIR_POINTING frame).
apertureExcitationProfile
str
Antenna aperture excitation profile. Accepted values are “UNIFORM” and “COSINE”.
apertureEfficiency
float
Aperture efficiency.
radiationEfficiency
float
Radiation efficiency.
phyTemp
float
Kelvin
Physical temperature of the antenna.
Example:
"antenna":{ "shape":"rectangular", "height": 4.9, "width": 0.7, "apertureExcitationProfile": "UNIFORM", "apertureEfficiency": 0.6, "radiationEfficiency": 0.8, "phyTemp": 290 }
Todo
The operating frequency is not made as a specification of the antenna. Change behavior in the future?
syntheticDataConfig JSON object
This JSON object is used to describe the configuration of the synthetic data to be produced by the instrument models. A source data file containing gridded geophysical data in netCDF format and the name of the geophysical variable appropriate to the instrument is required as input. SCIPY_LINEAR and METPY_LINEAR are inbuilt interpolation methods which can be invoked for interpolation.
Parameter |
Data type |
Units |
Description |
|---|---|---|---|
sourceFilePaths |
list str |
List of absolute filepaths of the science-data files in NetCDF format. Each file corresponds to a specific (forecast/analysis) time. |
|
geophysicalVar |
str |
Geophysical variable (name as present in the source NetCDF file) to be used for the synthetic data. |
|
interpolMethod |
str |
Interpolation method to be employed while interpolating the source data onto the pixel-positions. Allowed values are: SCIPY_LINEAR and METPY_LINEAR. |
Example:
"syntheticDataConfig":{
"sourceFilePaths": ["C:/workspace/gfs_forecast_data/gfs.t12z.pgrb2.0p25.f000.nc",
"C:/workspace/gfs_forecast_data/gfs.t12z.pgrb2.0p25.f001.nc",
"C:/workspace/gfs_forecast_data/gfs.t12z.pgrb2.0p25.f002.nc",
"C:/workspace/gfs_forecast_data/gfs.t12z.pgrb2.0p25.f003.nc,
"C:/workspace/gfs_forecast_data/gfs.t12z.pgrb2.0p25.f004.nc"],
"geophysicalVar": "TMP_P0_L1_GLL0",
"interpolMethod": "SCIPY_LINEAR"
}
mode JSON object format
The mode json object is used when initializing an instrument with several modes using the instrupy.base.Instrument class.
Several modes (in a list) maybe specified within a single instrument. Each mode corresponds to a specific operating point. For example,
consider a Basic Sensor instrument which operates at two look-angles: (1) nadir-look (2) side-look at 30 deg.
Such an instrument is considered to be made up of two modes with one mode specifying the nadir-look and the other mode specifying the side-look.
A mode-identifier can be specified by the user with which the corresponding mode can be referenced.
Parameter |
Type |
Units |
Description |
|---|---|---|---|
@id |
string |
Unique identifier of mode. |
The parameters outside the mode block are used as the common parameters for all the modes, while the parameters specified within a mode list entry are specific to the particular mode.
Example:
specs = '{ "@type": "Basic Sensor",
"name": "Atom",
"@id": "senX",
"mass": 28,
"volume": 0.12,
"power": 32,
"bitsPerPixel": 8,
"fieldOfViewGeometry": {
"shape": "CIRCULAR",
"diameter": 35
},
"mode":[{
"@id": "NadirObservationMode",
"orientation": {
"referenceFrame": "SC_BODY_FIXED",
"convention": "REF_FRAME_ALIGNED"
}
},
{
"@id": "SideObservationMode",
"orientation": {
"referenceFrame": "SC_BODY_FIXED",
"convention": "SIDE_LOOK",
"sideLookAngle": 30
}
}
]
}'
x = Instrument.from_json(specs)